项目地址:here
包围盒
// TODO : Find out the bounding box of current triangle.
// iterate through the pixel and find if the current pixel is inside the triangle
int left = MIN(v[0].x(), MIN(v[1].x(), v[2].x())) - 1;
int right = MAX(v[0].x(), MAX(v[1].x(), v[2].x())) + 1;
int bottom = MIN(v[0].y(), MIN(v[1].y(), v[2].y())) - 1;
int top = MAX(v[0].y(), MAX(v[1].y(), v[2].y())) + 1;
三角形栅格化算法
for (int x = left; x <= right; x++)
{
for (int y = bottom; y <= top; y++)
{
if (insideTriangle(x, y, t.v))
{
std::tuple<float, float, float> alpha = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0 / (std::get<0>(alpha) / v[0].w() + std::get<1>(alpha) / v[1].w() + std::get<2>(alpha) / v[2].w());
float z_interpolated = std::get<0>(alpha) * v[0].z() / v[0].w() + std::get<1>(alpha) * v[1].z() / v[1].w() + std::get<2>(alpha) * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
if (z_interpolated < depth_buf[get_index(x, y)])
{
depth_buf[get_index(x, y)] = z_interpolated;
set_pixel(Vector3f(x, y, z_interpolated), t.getColor());
}
}
}
}
点是否在三角形内
static bool insideTriangle(float x, float y, const Vector3f* _v)
{
// TODO : Implement this function to check if the point (x, y) is inside the triangle represented by _v[0], _v[1], _v[2]
float a = _v[0].x(), b = _v[0].y(), c = _v[1].x(), d = _v[1].y(), e = _v[2].x(), f = _v[2].y();
float t1 = (c - a)*(y - b) - (d - b)*(x - a);
float t2 = (e - c)*(y - d) - (f - d)*(x - c);
float t3 = (a - e)*(y - f) - (b - f)*(x - e);
bool x1 = true ? t1 > 0.0:false, x2 = true ? t2 > 0.0:false, x3 = true ? t3 > 0.0:false;
bool ret = false;
if ((x1 &x2&x3) || (!x1)&(!x2)&(!x3)) ret = true;
return ret;
}
z-buffer 算法
//... some code
if (z_interpolated < depth_buf[get_index(x, y)])
{
depth_buf[get_index(x, y)] = z_interpolated;
set_pixel(Vector3f(x, y, z_interpolated), t.getColor());
}
Anti-aliasing
//4x4 SuperSampling
const int sam_num16 = 16;
const int xy = 2;
const int x_coord = 0;
const int y_coord = 1;
float dir4x4[sam_num16][xy] = {
{0.125, 0.125},
{0.125, 0.375},
{0.125, 0.625},
{0.125, 0.875},
{0.375, 0.125},
{0.375, 0.375},
{0.375, 0.625},
{0.375, 0.875},
{0.625, 0.125},
{0.625, 0.375},
{0.625, 0.625},
{0.625, 0.875},
{0.875, 0.125},
{0.875, 0.375},
{0.875, 0.625},
{0.875, 0.875},
};
//2x2 SuperSampling
const int sam_num4 = 4;
float dir2x2[sam_num4][xy] = {
{0.25, 0.25},
{0.25, 0.75},
{0.75, 0.25},
{0.75, 0.75},
};
for (int x = left; x <= right; x++)
{
for (int y = bottom; y <= top; y++)
{
float min_dep = INFINITY;
int count = 0;
for (int i = 0; i < sam_num4; i++)
{
if (insideTriangle(x + dir2x2[i][x_coord], y + dir2x2[i][y_coord], t.v))
{
count++;
std::tuple<float, float, float> alpha = computeBarycentric2D(x, y, t.v);
float w_reciprocal = 1.0 / (std::get<0>(alpha) / v[0].w() + std::get<1>(alpha) / v[1].w() + std::get<2>(alpha) / v[2].w());
float z_interpolated = std::get<0>(alpha) * v[0].z() / v[0].w() + std::get<1>(alpha) * v[1].z() / v[1].w() + std::get<2>(alpha) * v[2].z() / v[2].w();
z_interpolated *= w_reciprocal;
min_dep = MIN(min_dep, z_interpolated);
}
}
if (count == 0)
continue;
if (min_dep < depth_buf[get_index(x, y)])
{
depth_buf[get_index(x, y)] = min_dep;
set_pixel(Vector3f(x, y, min_dep), t.getColor() * count / sam_num4);
}
}
}
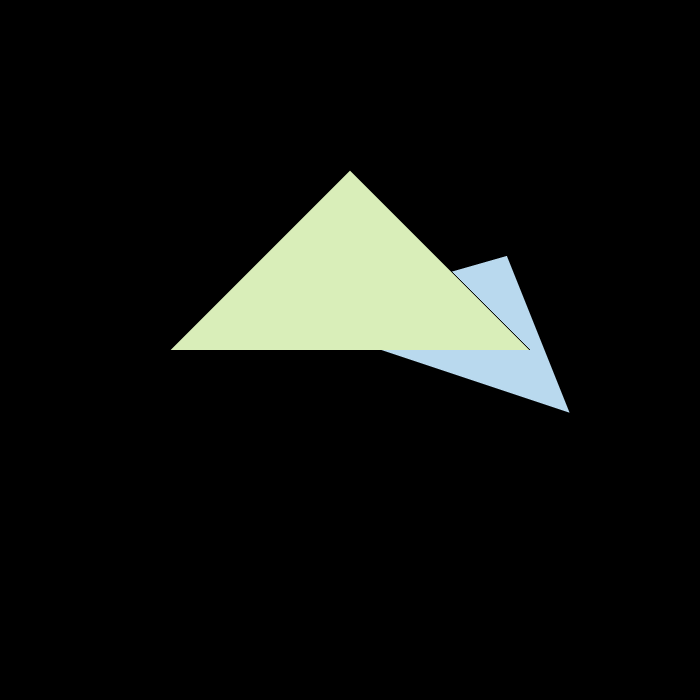
结果图
未抗锯齿
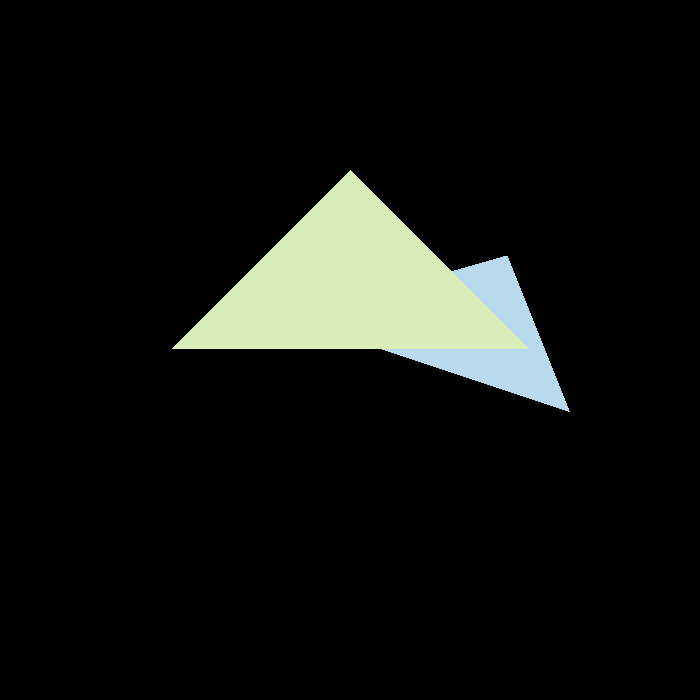
2x2 MSAA
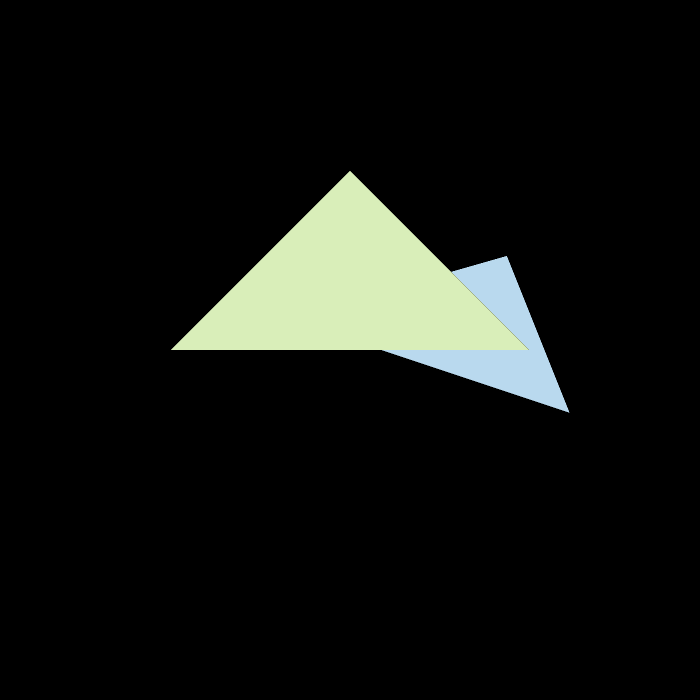
4X4 MSAA